
FASTCURVE
A solution by: CENIT
Application domain: Manufacturing
Solution Overview
Product Overview
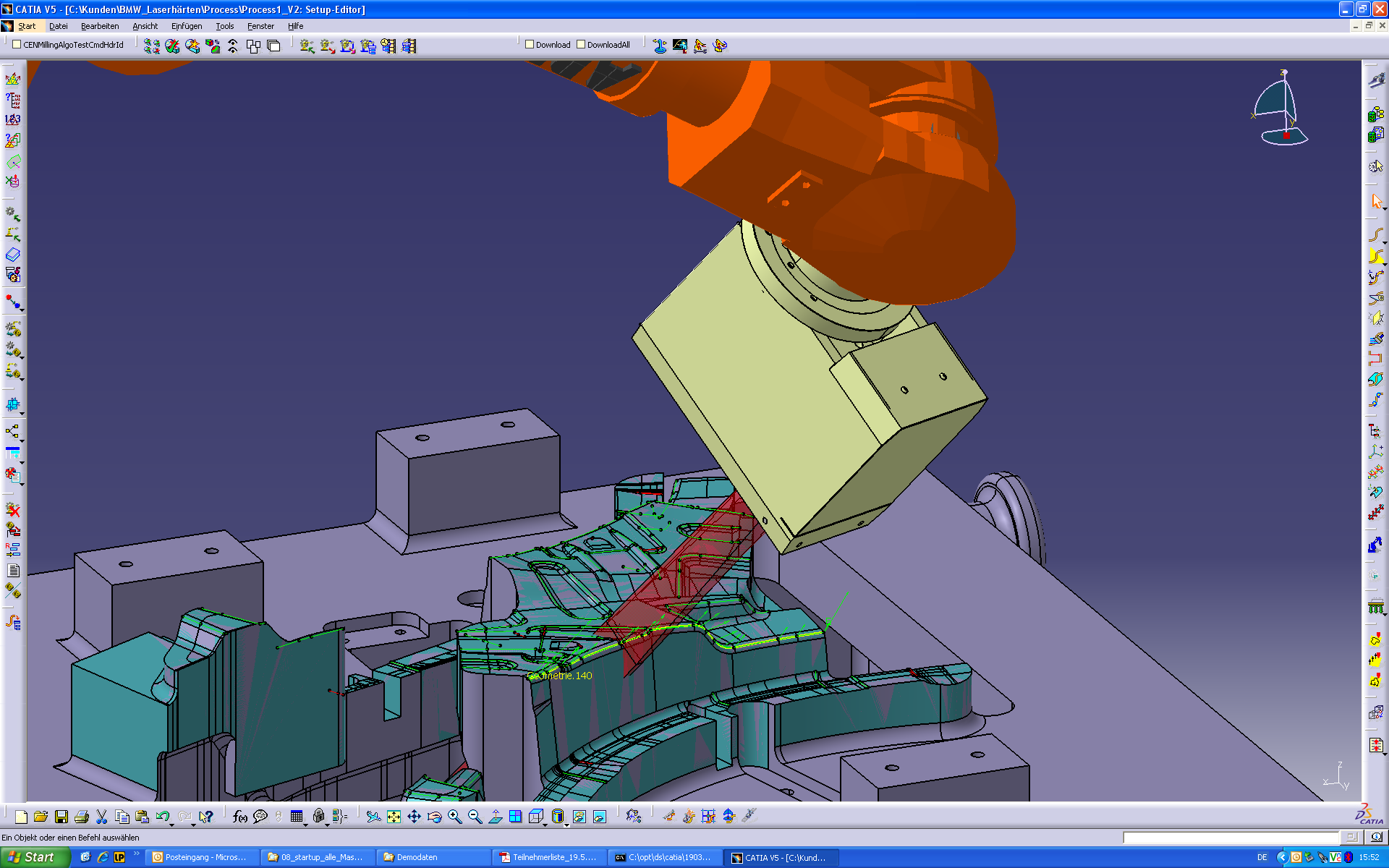
FASTCURVE is intelligent and high-performance offline programming software for 3D contours in a robotic environment. Several technologies are supported, from laser cutting, water jet cutting and ultrasound cutting, and sealing and roller hemming to laser hardening and laser cladding.
The various complex processes of 3D contour processing can be realized with FASTCURVE quickly, efficiently and in high quality, thanks to the seamless integration into the powerful CATIA/DELMIA V5 infrastructure, several automatic functions, integrated programming, comprehensive CAD/CAM ability and the simulation of the entire robot cell.
Product Advantages
- Fully integrated 3D programming, simulation and process verification
- Definition, simulation and validation of complex robot cells incl. robot, fixture, clamping mechanism and auxiliary axis systems
- Practice-proven and comfortable fixture construction which can be processed, nested and programmed in 2D, and also exported to external 2D systems (incl. UHF programming options)
- Free positioning as well as calibration function to align fixtures and component
- Geometry-based algorithms for the calculation of optimum, collision-free tool paths
- Parametric programming
- Versatile teach and optimization functions
- Macro recognition for standard geometries (circle, rectangle, hexagon, keyhole, etc.)
- Professional data preparation of contour and surface, intelligent contouring with contour search algorithms and definition of processing direction (regular, tangential)
- Precise control simulation (RRS)
- Reliable robot programs
Benefits
- Comprehensive process chain from the design to offline programming through the direct utilization of native V5 data
- Time savings with the automated creation of fixtures
- Increased availability of the robot cell through the omission of the teach-in process
- Extensive robot library
- High quality thanks to previous simulation and collision control
- Efficient changes thanks to the flexible adjustments to geometric framework conditions via the macroeditor
- User-friendly dialogs